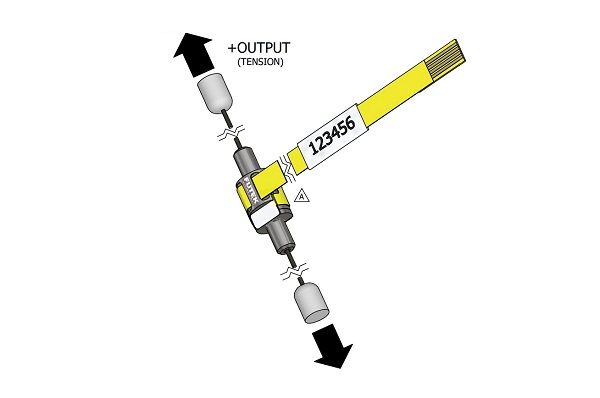
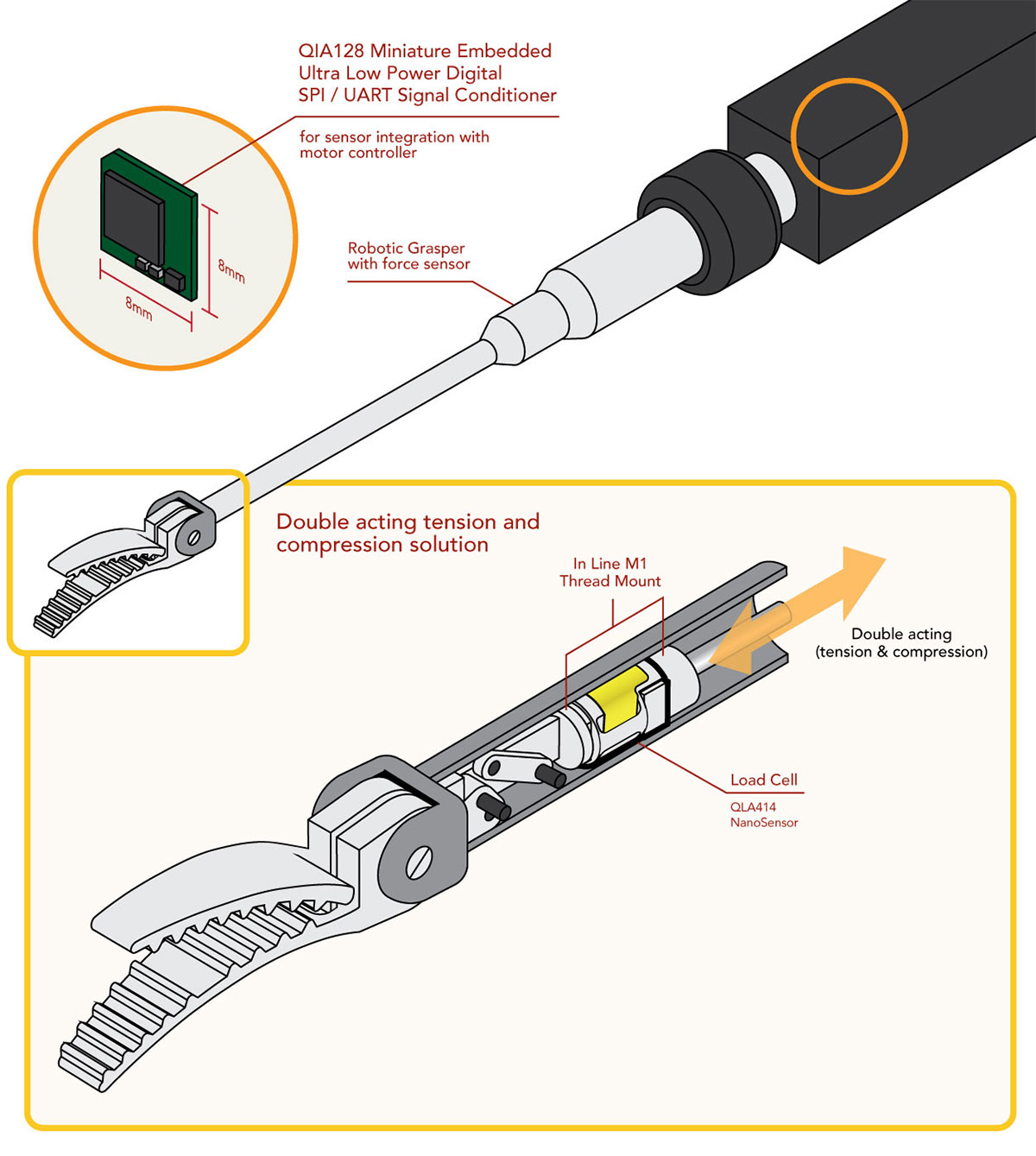
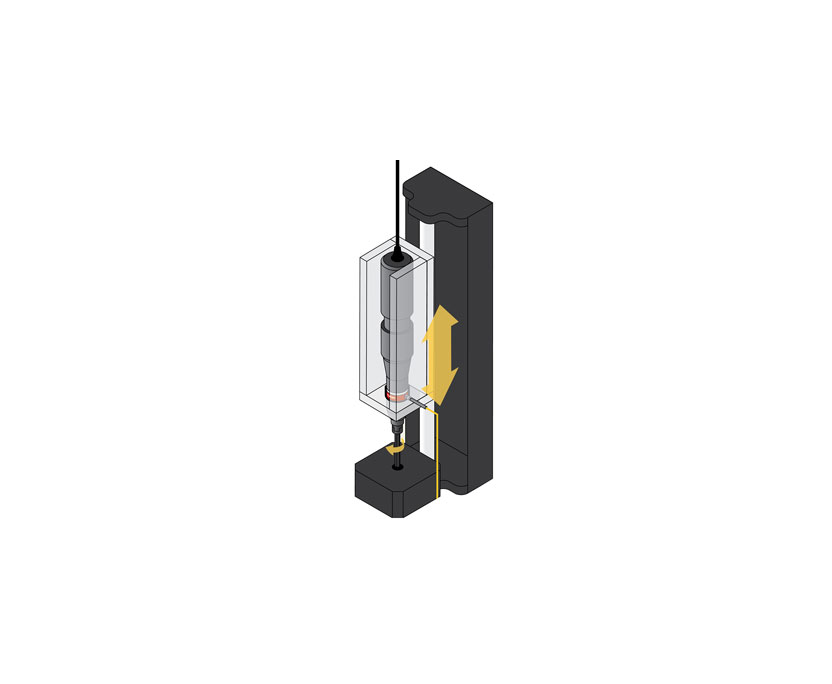
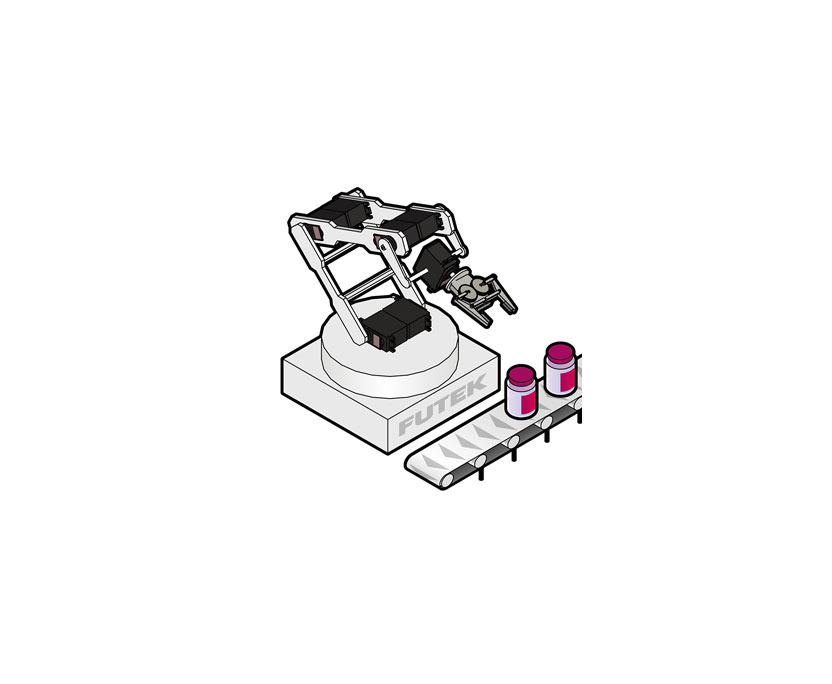
1、两个QLA414纳米传感器被安装在控制爪子运动的轴向导轨上。它测量张力(打开钳口)和压缩(关闭钳口)中的力。
2、由于钳爪在手术过程中与体内组织接触,纳米传感器测量钳爪施加的力。
3、测力信号由带有SPI输出的QIA128微型超低功率数字信号调节器读取,可用于系统集成。它能使外科医生的控制装置(如万向节)实现力反馈。
产品使用
QLA414纳 米力传感器,QLA427 杆式拉压型力传感器,QIA128 集成采集系统。
| QLA414 纳米力传感器 |
| QLA427 纳米力传感器 |
| QIA128 超低功耗微型集成采样系统 |




 电话020-85262155
电话020-85262155 邮箱sales@omgl.com.cn
邮箱sales@omgl.com.cn
 医疗与制药
医疗与制药
 机器人和系统集成商
机器人和系统集成商
 自动化
自动化
 汽车
汽车
 制造业
制造业
 材料和耐久性测试
材料和耐久性测试
 航天航空与国防
航天航空与国防
 农业
农业